Lab 11: Localization (real)
Overview
The goal of this lab was to run the Bayes filter on the real robot. On hardware I used only the update step from a 360 degree observation loop. The main issue was perceptual aliasing on the +x side of the map: several cells produce similar range signatures, so a uniform-prior update can jump to the wrong place.
Simulation check
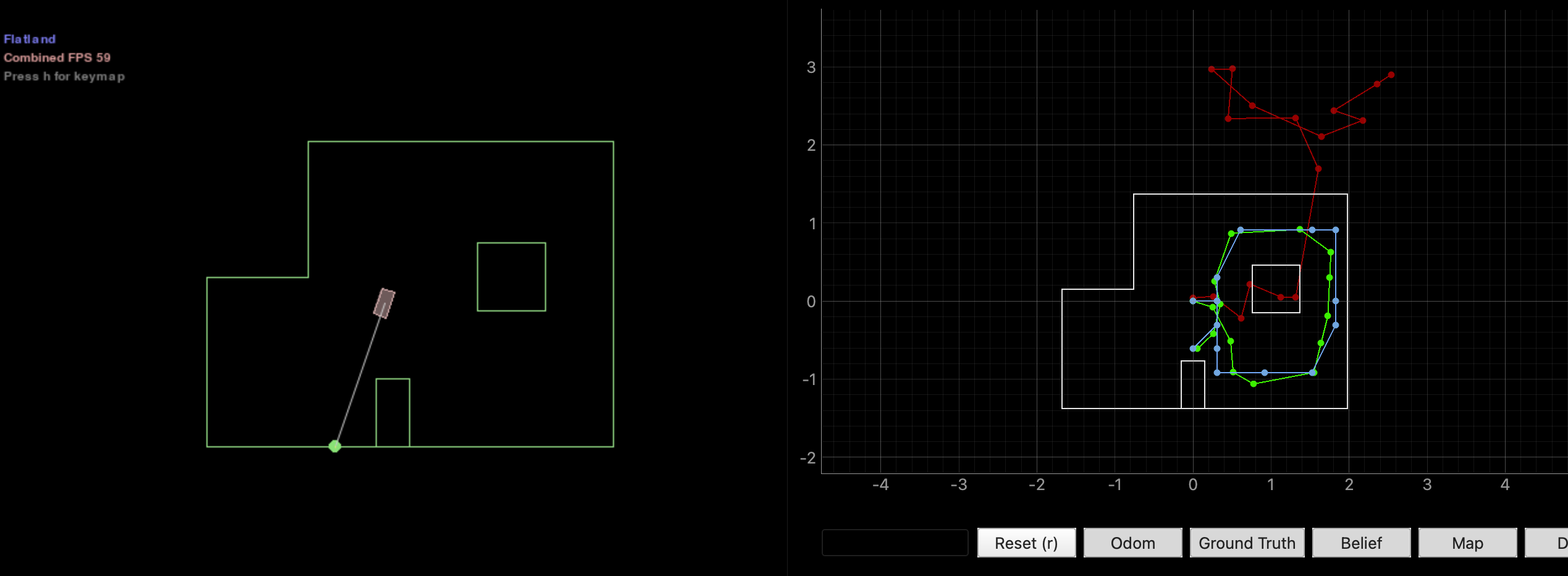
I first ran the provided simulation notebook to verify that the reference Bayes filter behavior was still correct before moving to BLE and real sensors.
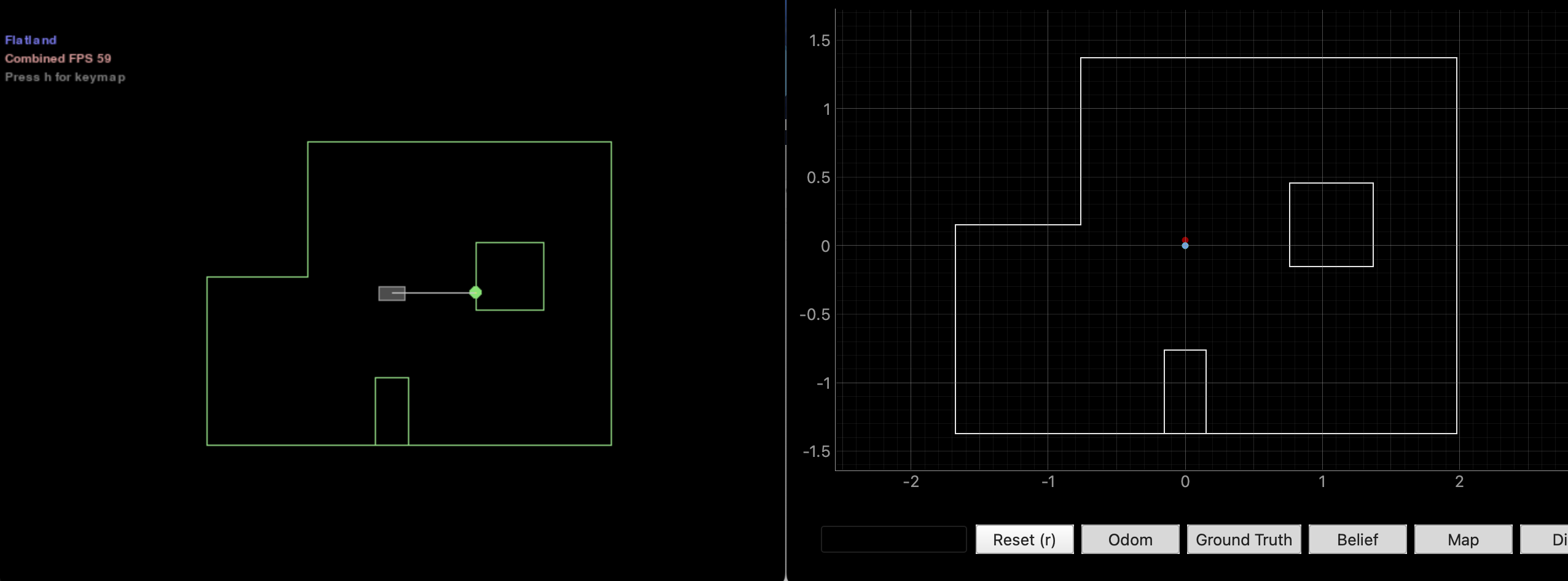
The final plot looked normal, so later failures on the real robot were much more likely to come from sensing and map ambiguity than from the filter math itself. I also ran a longer simulated trajectory and confirmed that the Bayes-filter estimate kept following ground truth better than raw odometry.
Observation loop on the real robot
The lab expects 18 readings, 20 degrees apart, starting at the current heading and rotating counter-clockwise. Instead of writing a new scan routine, I reused my Lab 9 map scan. The firmware performs a dense 3 degree sweep over about one full turn, then Python downsamples those samples into the 18 observations expected by the localization notebook. I used the right ToF for the final observation vector because its placement gives cleaner geometry during an in-place turn, and I subtracted a small sensor mount offset in Python to better match the map ray cast.
Python: perform_observation_loop using MAP scan
def _parse_map_status(self, msg):
parts = msg.split('|')
if len(parts) != 9 or parts[0] != 'MAP_STATUS':
raise ValueError(f'Unexpected MAP_STATUS message: {msg}')
return {
'state': parts[1],
'sample_idx': int(parts[2]),
'log_pos': int(parts[3]),
'phase': int(parts[4]),
'start_ms': int(parts[5]),
'now_ms': int(parts[6]),
'sweep_deg': int(parts[7]),
'step_deg': int(parts[8]),
}
def perform_observation_loop(self, rot_vel=120):
SENSOR_YAW_DEG = -90.0
SENSOR_MOUNT_OFFSET_M = 0.03
observation_count = int(self.config_params['mapper']['observations_count'])
target_bearing_step = 360.0 / observation_count
fw_step_deg = 3
fw_sweep_deg = 380
fw_samples_goal = int(np.ceil(fw_sweep_deg / fw_step_deg))
timeout_ms = 120000
turn_dir = -1
map_buf = []
map_done = {'value': False}
def map_notify_handler(uuid, bytearray_data):
msg = self.ble.bytearray_to_string(bytearray_data).strip()
map_buf.append(msg)
if msg.startswith('MAP_END|'):
map_done['value'] = True
self.ble.start_notify(self.ble.uuid['RX_STRING'], map_notify_handler)
self.ble.send_command(
CMD.MAP_START,
f'{fw_step_deg}|{fw_samples_goal}|{timeout_ms}|{turn_dir}|{fw_sweep_deg}'
)
wait_deadline = time.time() + timeout_ms / 1000.0 + 3.0
while time.time() < wait_deadline:
if any(msg.startswith('MAP_DONE|') or msg.startswith('MAP_TIMEOUT') for msg in map_buf):
break
self.ble.send_command(CMD.GET_MAP_STATUS, '')
try:
last_status = self._parse_map_status(
self.ble.receive_string(self.ble.uuid['RX_STRING'])
)
if last_status['state'] == 'IDLE':
break
except Exception:
pass
time.sleep(0.25)
self.ble.send_command(CMD.GET_MAP_DATA, '')
while not map_done['value']:
time.sleep(0.10)
rows = []
for msg in map_buf:
if not msg.startswith('MAP|'):
continue
parts = msg.split('|')
rows.append({
'target_deg': int(parts[1]) / 10.0,
'heading_deg': int(parts[2]) / 10.0,
'front_mm': int(parts[3]),
'right_mm': int(parts[4]),
'time_ms': int(parts[5]),
})
rows = sorted(rows, key=lambda row: row['time_ms'])
headings_cw = np.array([row['heading_deg'] for row in rows], dtype=float)
headings_unwrapped = np.rad2deg(np.unwrap(np.deg2rad(headings_cw)))
delta = headings_unwrapped - headings_unwrapped[0]
rotation_sign = 1.0 if delta[-1] >= 0 else -1.0
position_mod = np.mod(rotation_sign * delta, 360.0)
target_robot_positions = np.mod(
np.arange(observation_count) * target_bearing_step - SENSOR_YAW_DEG,
360.0,
)
right_vals = np.array([r['right_mm'] for r in rows], dtype=float)
right_ok_mask = right_vals > 0
selected_indices = []
for target in target_robot_positions:
diff = position_mod - target
diff = (diff + 180.0) % 360.0 - 180.0
order = np.argsort(np.abs(diff))
j = next(int(k) for k in order if right_ok_mask[k])
selected_indices.append(j)
selected_rows = [rows[j] for j in selected_indices]
right_mm = np.array([r['right_mm'] for r in selected_rows], dtype=float)
sensor_ranges = np.clip(right_mm / 1000.0 - SENSOR_MOUNT_OFFSET_M, 0.0, None)[np.newaxis].T
sensor_bearings = (np.arange(observation_count) * target_bearing_step)[np.newaxis].T
return sensor_ranges, sensor_bearings
Arduino: map command entrypoints
case MAP_START:
{
int step_deg = 3;
int samples_goal = 127;
int timeout_ms = 120000;
int turn_dir = 1;
int sweep_deg = 380;
robot_cmd.get_next_value(step_deg);
robot_cmd.get_next_value(samples_goal);
robot_cmd.get_next_value(timeout_ms);
robot_cmd.get_next_value(turn_dir);
robot_cmd.get_next_value(sweep_deg);
map_step_deg = constrain(step_deg, 1, 180);
map_samples_goal = constrain(samples_goal, 1, MAP_LOG_LEN);
map_timeout_ms = (unsigned long)max(1000, timeout_ms);
map_turn_dir = (turn_dir >= 0) ? 1 : -1;
map_sweep_deg = constrain(sweep_deg, 1, 720);
start_map_run();
break;
}
case GET_MAP_DATA:
stream_map_history();
break;
case GET_MAP_STATUS:
send_map_status();
break;
Arduino: map logging and status pipeline
void stream_map_history() {
for (int i = 0; i < map_log_pos; i++) {
tx_estring_value.clear();
tx_estring_value.append("MAP|");
tx_estring_value.append((int)map_target_hist[i]);
tx_estring_value.append("|");
tx_estring_value.append((int)map_heading_hist[i]);
tx_estring_value.append("|");
tx_estring_value.append((int)map_front_hist[i]);
tx_estring_value.append("|");
tx_estring_value.append((int)map_right_hist[i]);
tx_estring_value.append("|");
tx_estring_value.append((int)map_t_hist[i]);
ble_write_reliable_fast(tx_estring_value.c_str());
}
tx_estring_value.clear();
tx_estring_value.append("MAP_END|");
tx_estring_value.append(map_log_pos);
ble_write_reliable_fast(tx_estring_value.c_str());
}
void send_map_status() {
tx_estring_value.clear();
tx_estring_value.append("MAP_STATUS|");
tx_estring_value.append(runMode == RUN_MAP ? "RUNNING" : "IDLE");
tx_estring_value.append("|");
tx_estring_value.append(map_sample_idx);
tx_estring_value.append("|");
tx_estring_value.append(map_log_pos);
tx_estring_value.append("|");
tx_estring_value.append(map_phase);
tx_estring_value.append("|");
tx_estring_value.append((int)map_start_ms);
tx_estring_value.append("|");
tx_estring_value.append((int)millis());
tx_estring_value.append("|");
tx_estring_value.append(map_sweep_deg);
tx_estring_value.append("|");
tx_estring_value.append(map_step_deg);
ble_write_reliable_fast(tx_estring_value.c_str());
}
if (map_phase == 1) {
motorsStop();
int front_mm = -1;
int right_mm = -1;
unsigned long tof_ts = heading_ts;
if (read_map_tof_sample(front_mm, right_mm, tof_ts) && front_mm > 0) {
finish_map_sample(heading_deg, front_mm, right_mm, tof_ts);
return;
}
if (now - map_sample_wait_start_ms >= MAP_SAMPLE_WAIT_MS) {
finish_map_sample(heading_deg, -1, -1, heading_ts);
}
}
Baseline update-only localization
I first ran the localization exactly as assigned: one update step from a uniform prior. That baseline showed a clear split. The left and center-left side of the map localized very well, while the +x side was the weak spot. The failure mode was repeatable: the robot sometimes matched a left-side pose because several right-side observations looked too similar under a completely uniform prior.
For the required poses, the baseline behavior was:
(-3, -2): stable and correct(0, 3): stable and correct(5, -3): sometimes aliased to a left-side pose, mismatched to (5, 3).(5, 3): usually correct, but still had occasional left-side confusion, sometimes mismatched to (5, -3)
So the baseline already answered the main lab question: the robot does localize better in some poses, and the difference comes from how distinctive the local wall and corner geometry is.
Prior-guided localization
To remove that aliasing, I added an APPROX_POSE prior before the update step. If the car starts from a previously high-confidence pose, then odometry is still good enough to estimate the rough region where the robot should be now, even if it is not accurate enough to run a full prediction step. I used that estimate only as a weak spatial prior, then let the observation update choose the final cell.
Python: weak approximate-pose prior
RESET_TO_UNIFORM = False
APPROX_POSE = (5, -3, None)
PRIOR_XY_SIGMA = 0.35
PRIOR_THETA_SIGMA = None
def _normalize_distribution(dist, label):
total = float(np.sum(dist))
if not np.isfinite(total) or total <= 0:
raise RuntimeError(f'{label} collapsed; check prior/sensor settings')
return dist / total
def _apply_pose_prior(localizer, approx_pose, xy_sigma, theta_sigma=None):
prior = np.array(localizer.bel, dtype=float, copy=True)
prior = _normalize_distribution(prior, 'incoming prior')
if approx_pose is not None:
x0, y0, theta0 = approx_pose
dx = localizer.mapper.x_values - x0
dy = localizer.mapper.y_values - y0
spatial = np.exp(-0.5 * (dx * dx + dy * dy) / (xy_sigma * xy_sigma))
prior *= spatial
prior = _normalize_distribution(prior, 'real-robot prior')
localizer.bel = prior.copy()
localizer.bel_bar = prior.copy()
return prior
run_prior = _apply_pose_prior(loc, APPROX_POSE, PRIOR_XY_SIGMA, PRIOR_THETA_SIGMA)
After adding that weak prior, all four required poses localized to the correct cell in all three trials (3/3 each). The extra (0,0) validation point was also 3/3. This was the version I carried into Lab 12.
Pose (-3, -2)
This point localized very nicely even with the uniform-prior baseline. The final belief stayed in the correct cell and was essentially on top of the ground-truth pose, with no meaningful visible error. I think this point works so well because it is mostly enclosed by nearby walls with one main opening, so the scan is quite distinctive.
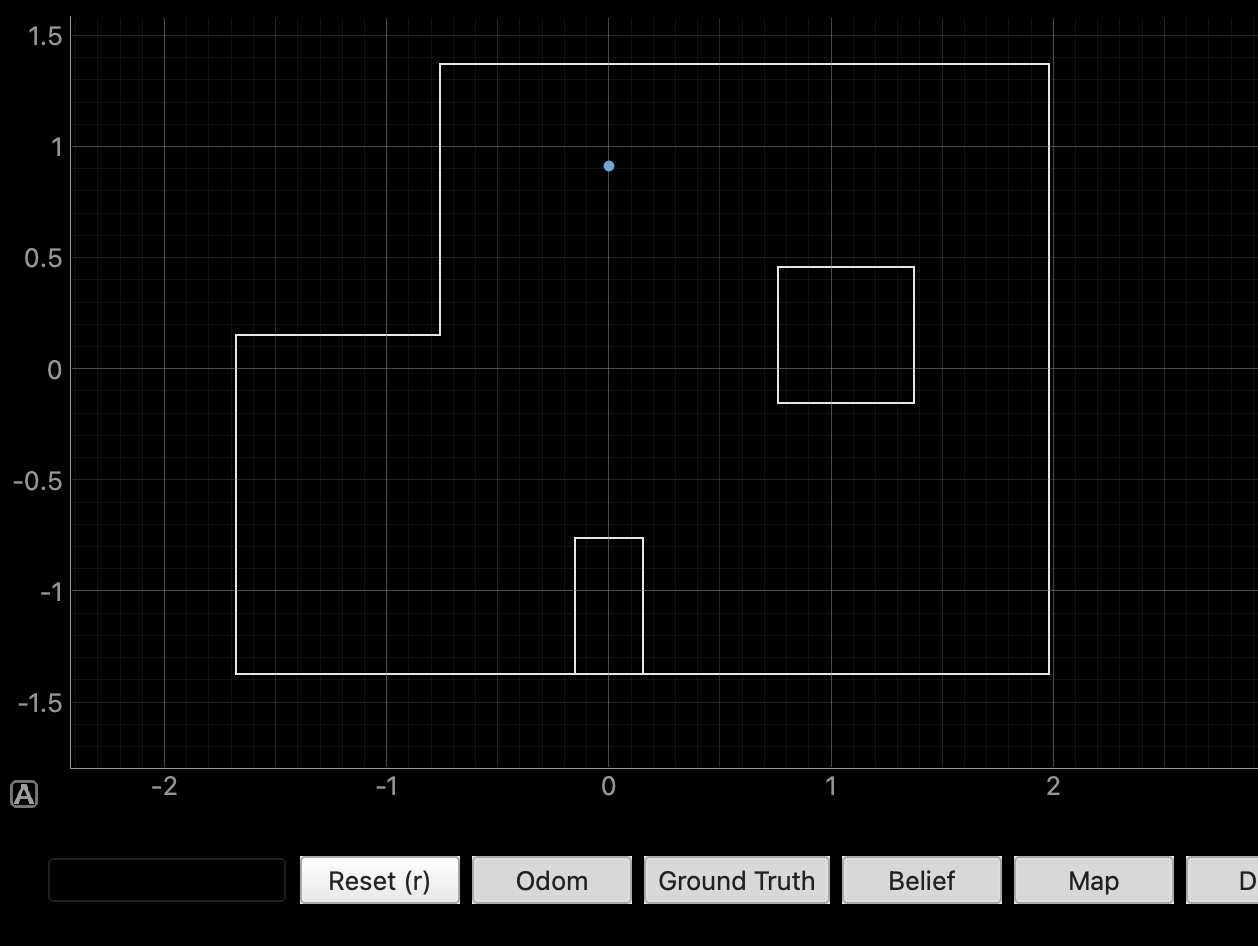
Pose (0, 3)
This point also localized cleanly. The final belief was again in the correct cell and the error was negligible by eye. I think this pose is easier because it sees a strong corner plus additional structure deeper in the map, so the 360 degree scan is less symmetric than the difficult +x poses.
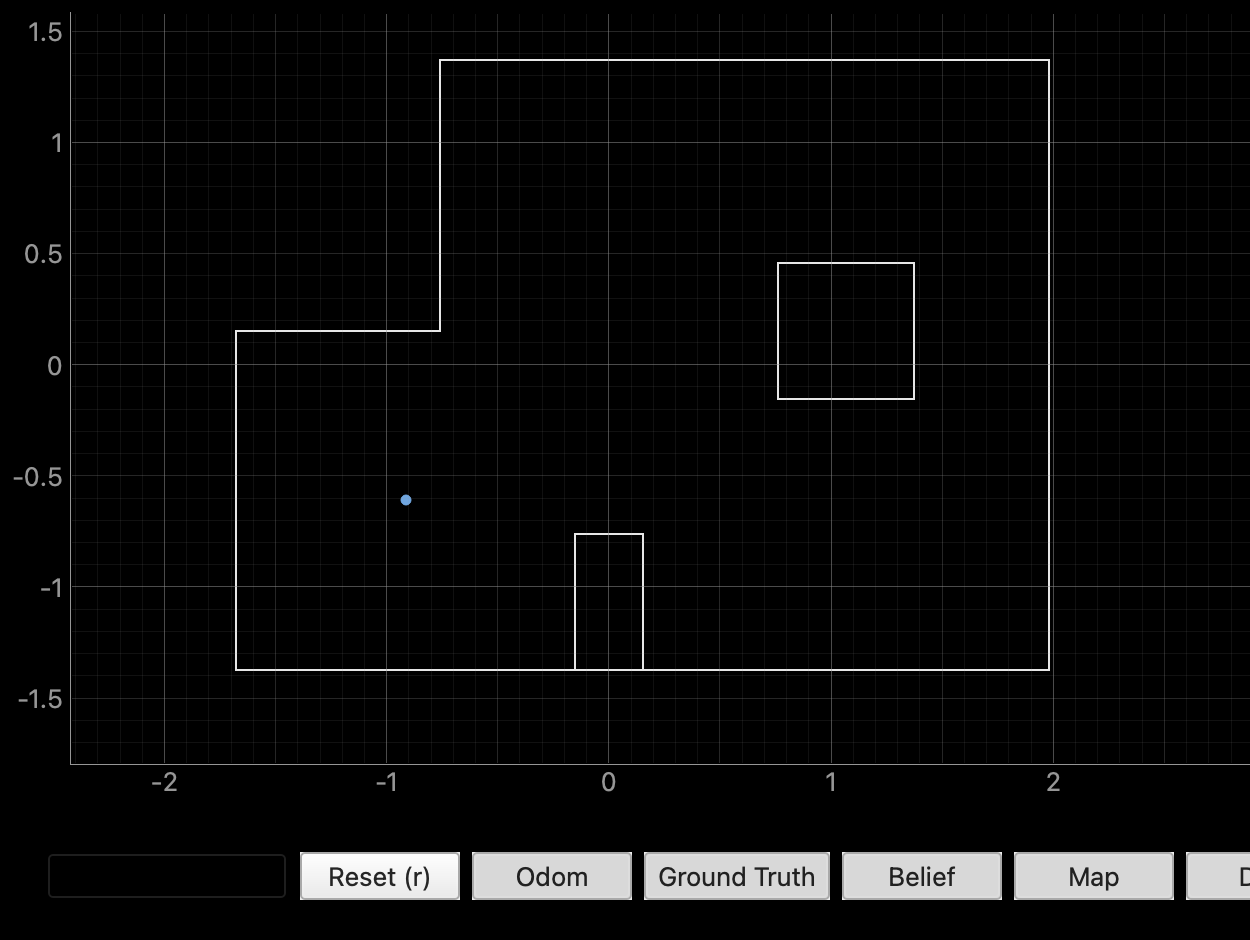
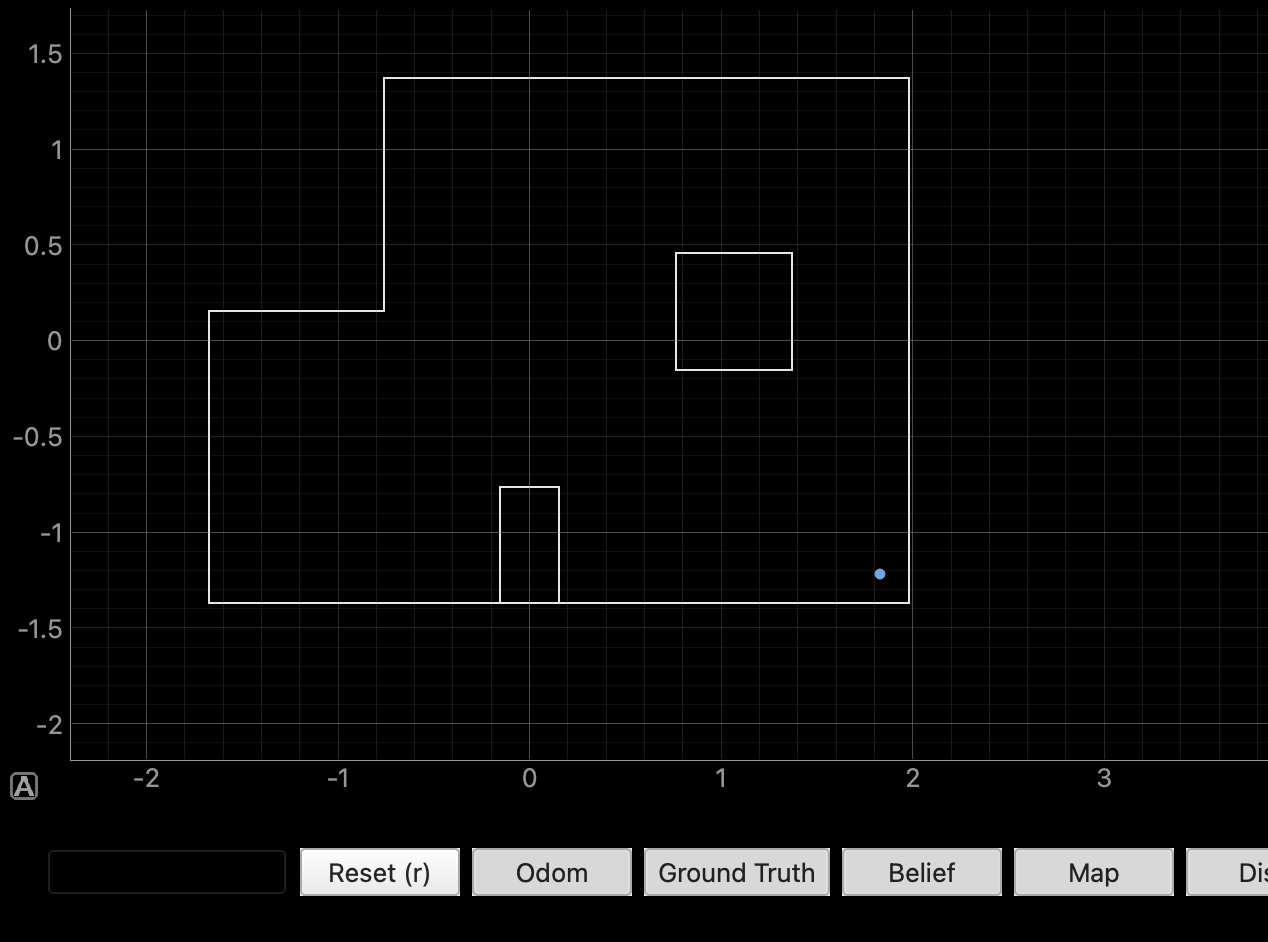
Pose (5, -3)
This was the worst required point in the baseline. Under a uniform prior it could collapse onto the wrong left-side pose because the scan was not globally distinctive enough. After adding APPROX_POSE, it localized to the correct cell in all three trials. The remaining bias was small but visible: the estimate sat a little low and right of ground truth, with about 0.5 ft of position error. My best explanation is that when the robot is near a tight corner, the ToF reading is slightly nonlinear and exaggerates how close that corner is, so the filter prefers a point that is a bit nearer to both walls than the real pose.
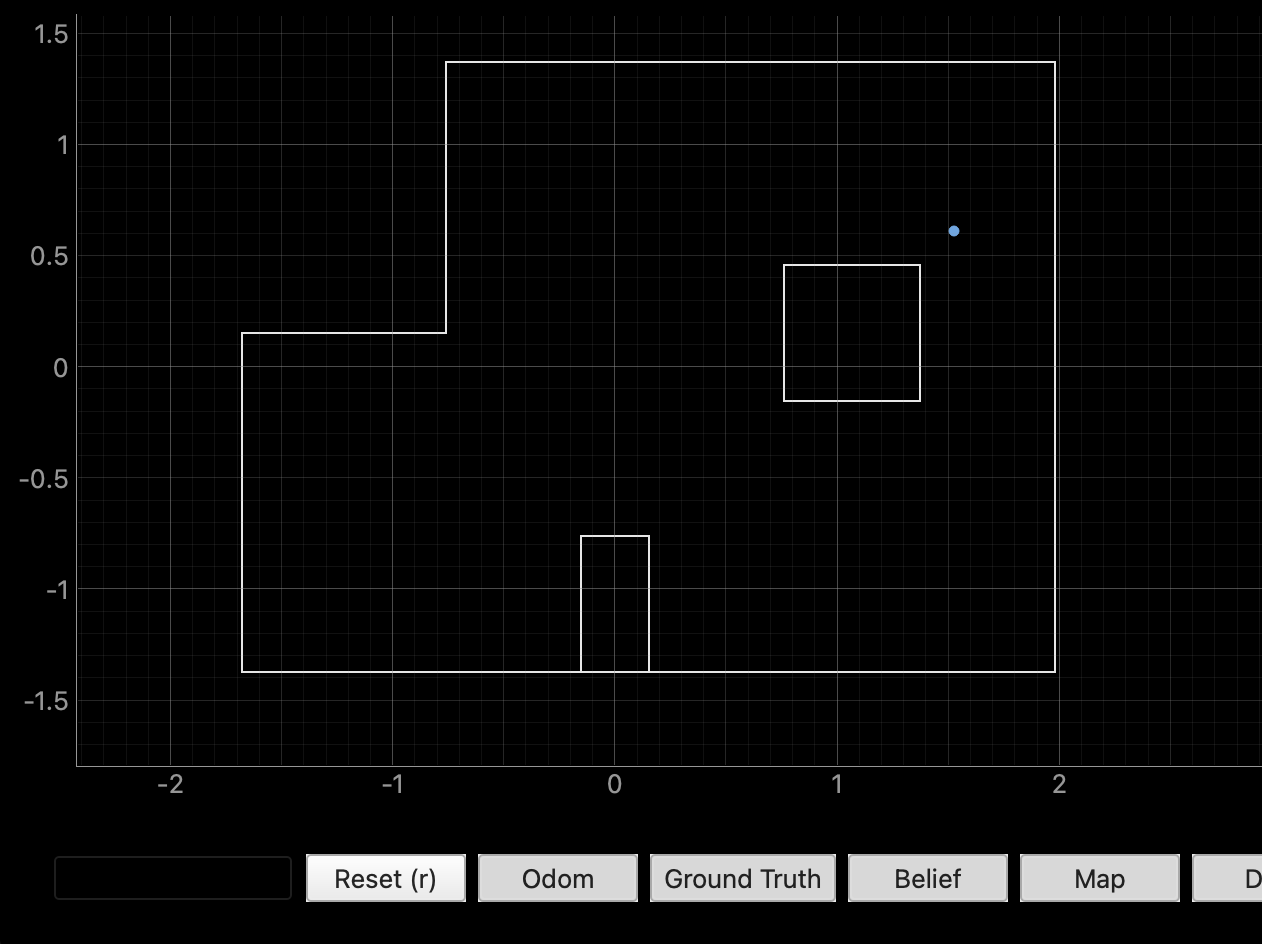
Pose (5, 3)
This point was better than (5,-3) in the baseline, but it could still alias occasionally. With the weak prior, all three trials ended in the correct cell. The residual bias here was larger than at (5,-3): the estimate was a bit low and left of ground truth, with about 1 ft of error. I suspect the same close-corner ToF exaggeration is involved here too, since the filter again behaves as if the robot is nearer to the nearby walls than it actually is.
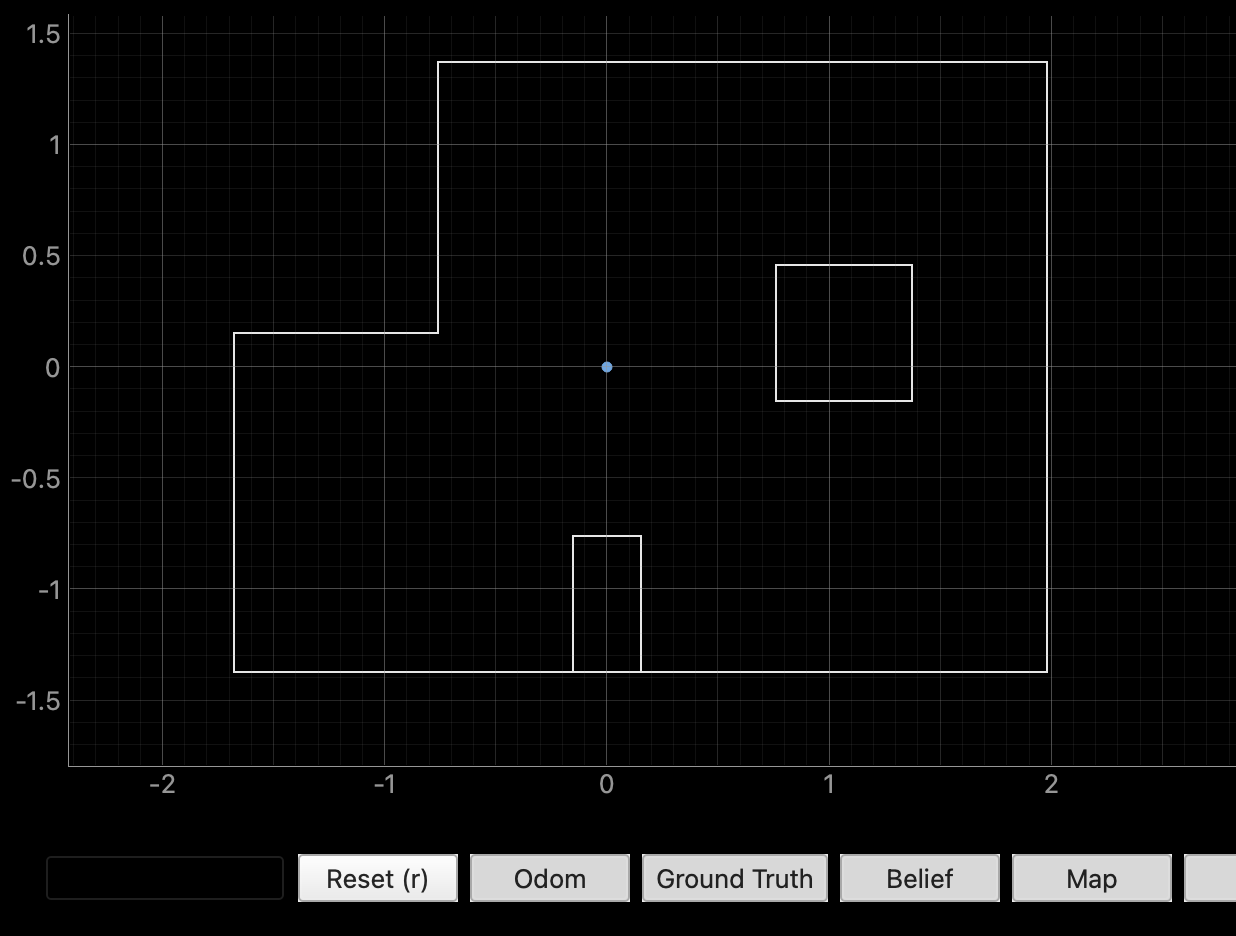
I also tested (0,0) as an extra validation point. It was the easiest one: the surrounding walls are very distinctive, and all three runs were essentially exact since this place is so unique.
Discussion
The baseline result showed the main lesson of this lab clearly: a single update step with a uniform prior is not always enough on the real robot, even when the Bayes filter code is correct. The robot localized best at (-3,-2), (0,3), and the extra (0,0) point because those places have distinctive nearby walls and openings. The right-side poses are more ambiguous, so multiple cells can produce similar 360 degree signatures.
The APPROX_POSE method fixed the wrong-cell jumps without pretending odometry is globally accurate. I did not use odometry as a full motion-model prediction step; I only used it to apply a weak prior over the plausible region before the update. That was enough to suppress the aliased left-side candidates. After that change, all four required poses were 3/3 correct-cell, and the only remaining errors were smaller sub-cell biases on the two right-side poses. That is the approach I will reuse in Lab 12.
Meet my cat Mulberry! 🐱

