Lab 12: Planning and Execution
ECE Robotics Day 🦾
The robot also performed at ECE Robotics Day before lab 12 was due, doing the same drift stunt from Lab 8.
Strategy
360° ToF scan (onboard) → Bayes filter update (offboard) → confirm start pose
Gyro PID align heading → timed forward drive → front ToF safety
Right ToF P-steer → front ToF PID speed/stop → all decisions onboard
Short move forward, but keep using rigth sensor follow the wall
The task is to navigate through 9 fixed waypoints on a known map. I did not implement global path planning. All the waypoints are given in advance and nothing in the environment moves, so there is nothing to plan online. Running the laptop as a real-time planner would also be impractical since BLE communication is too slow for closed-loop corrections to be useful at robot speed.
The path splits naturally into two phases. Segments 1 through 3 travel through open space at diagonal and lateral angles where wall references are not reliable, so I used gyroscope-based orientation control with timed forward drive. Segments 4 through 8 run along or close to the surrounding walls, so I switched to a wall-following controller using both the front and right ToF sensors.
The offboard laptop computes segment headings and stop distances from the waypoint geometry, then sends a single BLE command to start each segment. Everything after that like motor control, gyro PID, wall-follow PID, front ToF safety stops are all run onboard on the Artemis with no further laptop involvement until the segment finishes.
Open-Loop Phase
The first three segments move from (-4,-3) to (-2,-1), then to (1,-1), then down to (2,-3). For each segment the offboard laptop computes the required heading from the waypoint coordinates and sends it to the Artemis over BLE. Onboard, the Artemis runs a gyroscope PID loop to rotate to that heading, then drives forward for a duration the laptop also sent. The front ToF sensor check runs entirely onboard and stops the drive early if the robot gets too close to a wall before the timer expires.
IMU drift over these short distances is small enough that the position error at waypoint 3 is acceptable as a handoff into wall-following. The geometry of waypoints 1 through 3 and the surrounding walls makes it difficult to use a consistent right-sensor reference anyway, so offboard-timed drive with onboard heading control is the pragmatic choice here.
Python: open-loop segment execution
def orient_to_absolute_heading(target_deg, current_heading_deg, run_s=ORIENT_RUN_S, skip_band_deg=3.0):
delta_deg = _wrap_deg(target_deg - current_heading_deg)
if abs(delta_deg) <= skip_band_deg:
return target_deg, 0.0
ble.send_command(CMD.SET_ORIENT_TARGET, f'{delta_deg:.2f}')
ble.send_command(CMD.ORIENT_START, '')
time.sleep(run_s)
ble.send_command(CMD.ORIENT_STOP, '')
time.sleep(0.35)
return target_deg, delta_deg
def drive_open_loop(pwm, duration_ms):
ble.send_command(CMD.MOTOR_FORWARD, f'{int(pwm)}|{int(duration_ms)}')
time.sleep(duration_ms / 1000.0)
ble.send_command(CMD.MOTOR_BACKWARD, f'{OPEN_LOOP_BRAKE_PWM}|{OPEN_LOOP_BRAKE_MS}')
time.sleep(OPEN_LOOP_BRAKE_MS / 1000.0 + 0.05)
ble.send_command(CMD.MOTOR_STOP, '')
time.sleep(OPEN_LOOP_SETTLE_S)
for seg in EARLY_SEGMENTS:
target_heading = seg['control_heading_deg'] # computed from waypoint geometry
new_heading, _ = orient_to_absolute_heading(target_heading, estimated_heading_deg)
estimated_heading_deg = new_heading
drive_open_loop(seg['base_pwm'], seg['duration_ms'])
Arduino: timed motor command and auto-stop
case MOTOR_FORWARD:
{
int speed, duration;
if (!robot_cmd.get_next_value(speed)) break;
if (!robot_cmd.get_next_value(duration)) duration = 0;
set_manual_motor(MOT_FWD, speed, duration, "MOTOR_FWD");
break;
}
void handle_motors() {
if (motorTimed && millis() >= motorEndTime) {
motorsStop();
motorMode = MOT_IDLE;
motorTimed = false;
}
}
Initial Localization
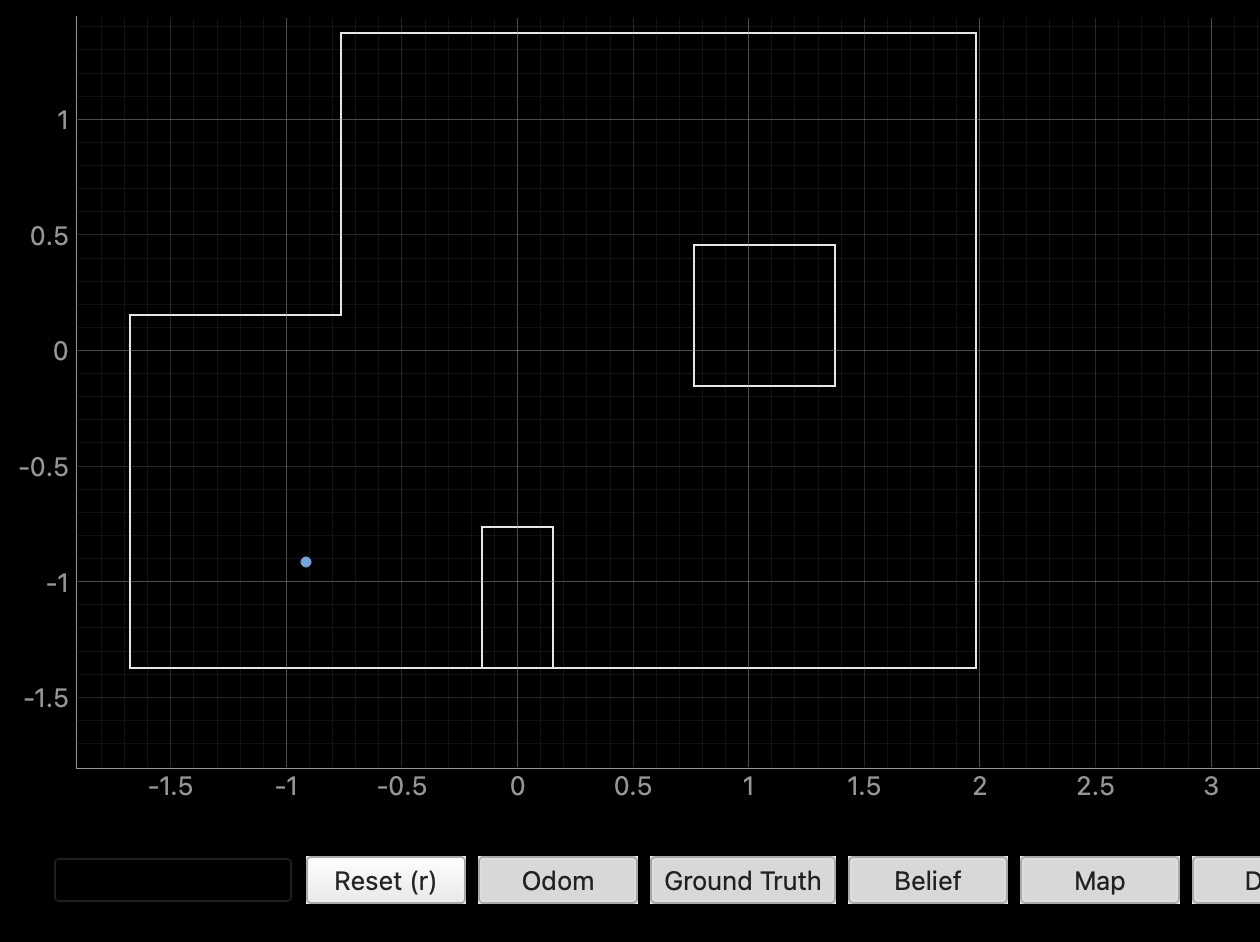
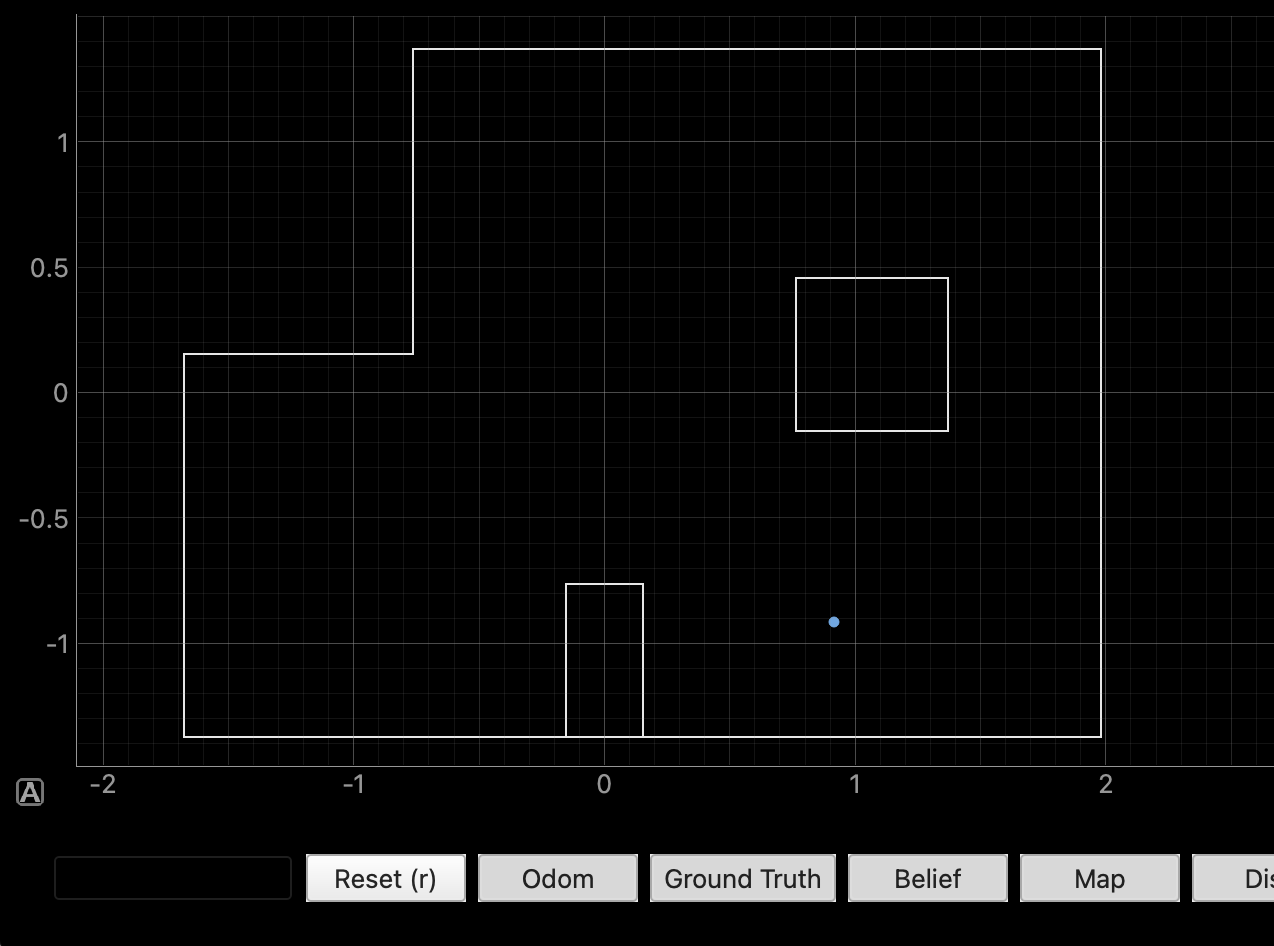
I ran one Bayes filter update at the very start to verify the robot’s actual placement at (-4,-3). Hand-placement is never exact. The Artemis onboard performs a 360-degree ToF sweep, streams the raw distances back over BLE, and the offboard laptop runs the Bayes filter update step. The filter applied a weak spatial Gaussian prior centered on the expected starting pose before the update.
The update converged at a belief probability of 0.9986 to the grid cell at (-4.0 ft, -3.0 ft) with an estimated heading of -10 degrees. The position match was essentially exact. The offboard laptop noted the small heading offset and factored it into the first turn command sent to the Artemis.
Python: Bayes filter update with weak pose prior
def _apply_pose_prior(localizer, approx_pose, xy_sigma):
prior = np.array(localizer.bel, dtype=float, copy=True)
prior /= np.sum(prior)
x0, y0, _ = approx_pose
dx = localizer.mapper.x_values - x0
dy = localizer.mapper.y_values - y0
prior *= np.exp(-0.5 * (dx**2 + dy**2) / xy_sigma**2)
prior /= np.sum(prior)
localizer.bel = prior.copy()
localizer.bel_bar = prior.copy()
def run_checkpoint_localization(approx_pose, note=''):
loc.init_grid_beliefs()
_apply_pose_prior(loc, approx_pose, PRIOR_XY_SIGMA)
loc.get_observation_data() # triggers 360° scan over BLE
loc.update_step()
best_idx = np.unravel_index(int(np.argmax(loc.bel)), loc.bel.shape)
best_prob = float(loc.bel[best_idx])
best_pose = mapper.from_map(*best_idx)
print(f'[{note}] best={best_pose} prob={best_prob:.4f}')
return {'best_pose': best_pose, 'best_prob': best_prob}
I originally planned a second offboard localization checkpoint after segment 3, before entering the wall-following phase, as an extra correction step. In the final run I removed it. The onboard wall-following controller corrects lateral offset within the first meter of each wall segment, so any drift from the open-loop phase gets absorbed quickly. The full offboard scan round-trip takes about 45 seconds over BLE and the benefit was not worth the time cost.
Wall-Following Phase
Professor Helbling mentioned in lecture that a robot can use its right-side sensor to track a wall. Segments 4, 5, 6, 7, and 8 all travel along walls, so I built the controller around exactly that idea.
The offboard laptop computes the target standoff distance and the expected front stop distance from a ray-cast against the map, then sends all of those parameters to the Artemis in one BLE command. After that the Artemis runs the entire wall-follow loop onboard: the right ToF sensor feeds a P controller that applies a steering bias to hold the target standoff, the front ToF sensor triggers a stop or a safety halt when the wall ahead is close enough, and both checks happen every sensor cycle with no further laptop involvement until the segment finishes and the Artemis notifies the laptop. Segment 5 between (5,-3) and (5,-2) is a short open-loop step where the offboard laptop sends a timed forward command and the Artemis drives forward with the right sensor still tracking the wall until the timer expires.
Arduino: wall-follow control loop
void handle_wall_follow() {
if (runMode != RUN_WALL_FOLLOW) return;
unsigned long now = millis();
if (now - wall_start_ms >= wall_timeout_ms) {
finish_wall_follow_run(3, true); // TIMEOUT
return;
}
float front_dist = 0.0f, right_dist = 0.0f;
unsigned long front_ts = now, right_ts = now;
bool got_front = read_front_tof_sample(front_dist, front_ts);
bool got_right = read_right_tof_sample(right_dist, right_ts);
if (got_front) {
if (front_dist <= wall_front_safety_mm) { finish_wall_follow_run(2, true); return; }
if (front_dist <= wall_front_stop_mm) { finish_wall_follow_run(1, true); return; }
}
int steer_bias = 0;
if (got_right) {
wall_invalid_count = 0;
float error_right = wall_target_right_mm - right_dist;
steer_bias = constrain(
(int)lroundf(wall_right_kp * error_right),
-wall_max_steer, wall_max_steer
);
} else if (++wall_invalid_count > wall_invalid_limit) {
finish_wall_follow_run(4, true); // RIGHT_INVALID — turned a corner
return;
}
motorsForwardSteered(wall_base_pwm, steer_bias);
append_wall_log(wall_last_front_mm, wall_last_right_mm, steer_bias,
wall_last_left_pwm, wall_last_right_pwm, now);
}
Python: wall-follow command dispatch and poll
def drive_wall_follow_segment(base_pwm, target_right_mm, kp, front_stop_mm,
front_safety_mm, timeout_ms, max_steer, invalid_limit):
ble.send_command(
CMD.WALL_FOLLOW_START,
f'{base_pwm}|{target_right_mm:.1f}|{kp:.4f}|{front_stop_mm:.1f}'
f'|{front_safety_mm:.1f}|{timeout_ms}|{max_steer}|{invalid_limit}'
)
deadline = time.time() + timeout_ms / 1000.0 + 2.0
while time.time() < deadline:
ble.send_command(CMD.GET_WALL_STATUS, '')
msg = ble.receive_string(ble.uuid['RX_STRING']).strip()
if msg.startswith('WALL_DONE|'):
parts = msg.split('|')
return {'reason': parts[1], 'log_pos': int(parts[2])}
status = robot._parse_wall_status(msg)
if status['state'] == 'IDLE' and status['reason'] != 'NONE':
return status
time.sleep(0.15)
raise TimeoutError('wall-follow timed out')
Simulation Validation
Before testing on hardware I ran the full strategy in simulation to verify the logic. The simulator mirrors the real split: offboard Python drives the waypoint sequence and runs the Bayes filter, while the simulated robot executes motion commands that represent what the Artemis would do onboard.
Failures and Iteration
The first wall-following attempts failed because the right-sensor P gain was too low. Corrections came too late and the robot drifted into the wall before the steer bias could pull it back.
Making the Right Sensor Robust
The core problem was that a small wall_right_kp produced a small steer_bias, so the robot could be 100mm off from its target standoff and still receive only a gentle correction. By the time the correction accumulated to a meaningful steering change, the robot had already closed the gap. Increasing wall_right_kp made the correction proportional to the actual position error so that a larger offset produced a strong immediate steer. The wall_max_steer cap prevents the gain from causing overcorrection oscillation once the robot is close to the target standoff.
Arduino: right-sensor proportional steer calculation
float error_right = wall_target_right_mm - right_dist;
// steer_bias > 0 → more left motor, robot steers right (toward wall)
// steer_bias < 0 → more right motor, robot steers left (away from wall)
steer_bias = constrain(
(int)lroundf(wall_right_kp * error_right),
-wall_max_steer, wall_max_steer
);
motorsForwardSteered(wall_base_pwm, steer_bias);
Python: wall-follow gain parameters sent to Artemis
WALL_KP = 0.14 # right-sensor P gain — tuned until corrections were fast enough
WALL_MAX_STEER = 25 # max PWM delta; caps the gain to prevent oscillation
# each segment's front_stop_mm and front_safety_mm come from
# the theoretical ray-cast distance at the waypoint endpoint,
# so no hard distances are ever written by hand
seg['front_stop_mm'] = max(220, int(round(front_stop_scale * geom['end_front_mm'])))
status = drive_wall_follow_segment(
seg['base_pwm'], seg['target_right_mm'],
WALL_KP, seg['front_stop_mm'],
seg.get('front_safety_mm', WALL_FRONT_SAFETY_MM),
seg['timeout_ms'], WALL_MAX_STEER, WALL_INVALID_LIMIT
)
After the tuning, segments 6 and 8 stopped cleanly on a front-distance event decided fully onboard. Segments 4 and 7 stopped on a right-invalid event, which happens correctly onboard when the robot rounds a corner and the Artemis detects that the right sensor has lost the wall. In both cases the Artemis sent a WALL_DONE notification to the laptop only after stopping, so the laptop was never in the control loop.
Final Run
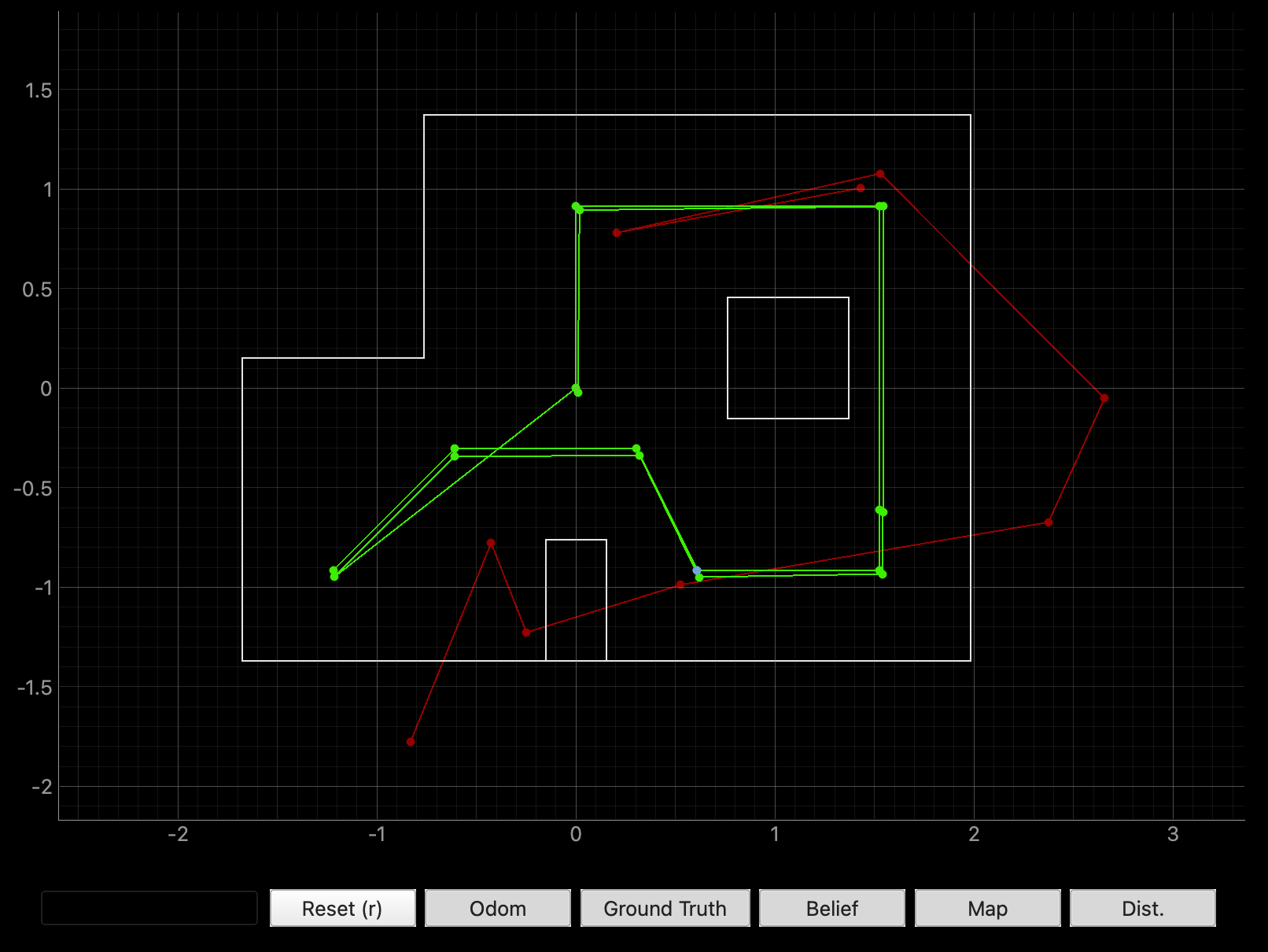
The final run executes all 8 segments in sequence. The open-loop phase brings the robot to approximately (2,-3). The wall-follower picks up the bottom wall and carries it to (5,-3), steps north to (5,-2), follows the east wall up to (5,3), follows the top wall west to (0,3), and then follows the center wall south to (0,0).
Waypoints 1 through 3 are hit approximately. The offboard laptop sends heading and duration to the Artemis and then waits; IMU drift and wheel slip accumulate over those diagonal and lateral segments, but the total error stays within roughly one grid cell since the distances are short. Waypoints 4 through 9 are much more accurate because the onboard wall-follow controller corrects position continuously throughout each segment without any round-trip to the laptop. The final position at (0,0) landed within about half a foot of the target. Total run time from start to finish was 1 minute 11 seconds.
Meet my cat Mulberry! 🐱



















